Institute of
Cognitive Integrated Sensor Systems
Prof. Dr.-Ing. Andreas König
Resource-Efficient, Robust Sensor and Wireless Signal Processing for autonomous networked Systems in Fluid Media (ROSIG, sub-project of BMBF mst-avs project PAC4PT)
Subject:
In
automation and process industry, e.g., chemical, biological, food
production or related fields, distributed processes are commonly
monitored by rather scarce and often stationary sensors. In the
BMBF-project PAC4PT the distributed logging of data is tackled by
developping a swarm of MEMS-integrated wireless sensors, that flow in
the media for a campaign duration. The sub project ROSIG contributes to
sensor node and system architecture, related signal processing,
electronics design, and functional test of components and system as
well as multivariate distributed data visualization. In particular, the
providing of location context by a dedicated location method based
magnetic field generation and sensing as well as self-x properties in
the nodes are in the focus of the subproject ROSIG.
Abstract:
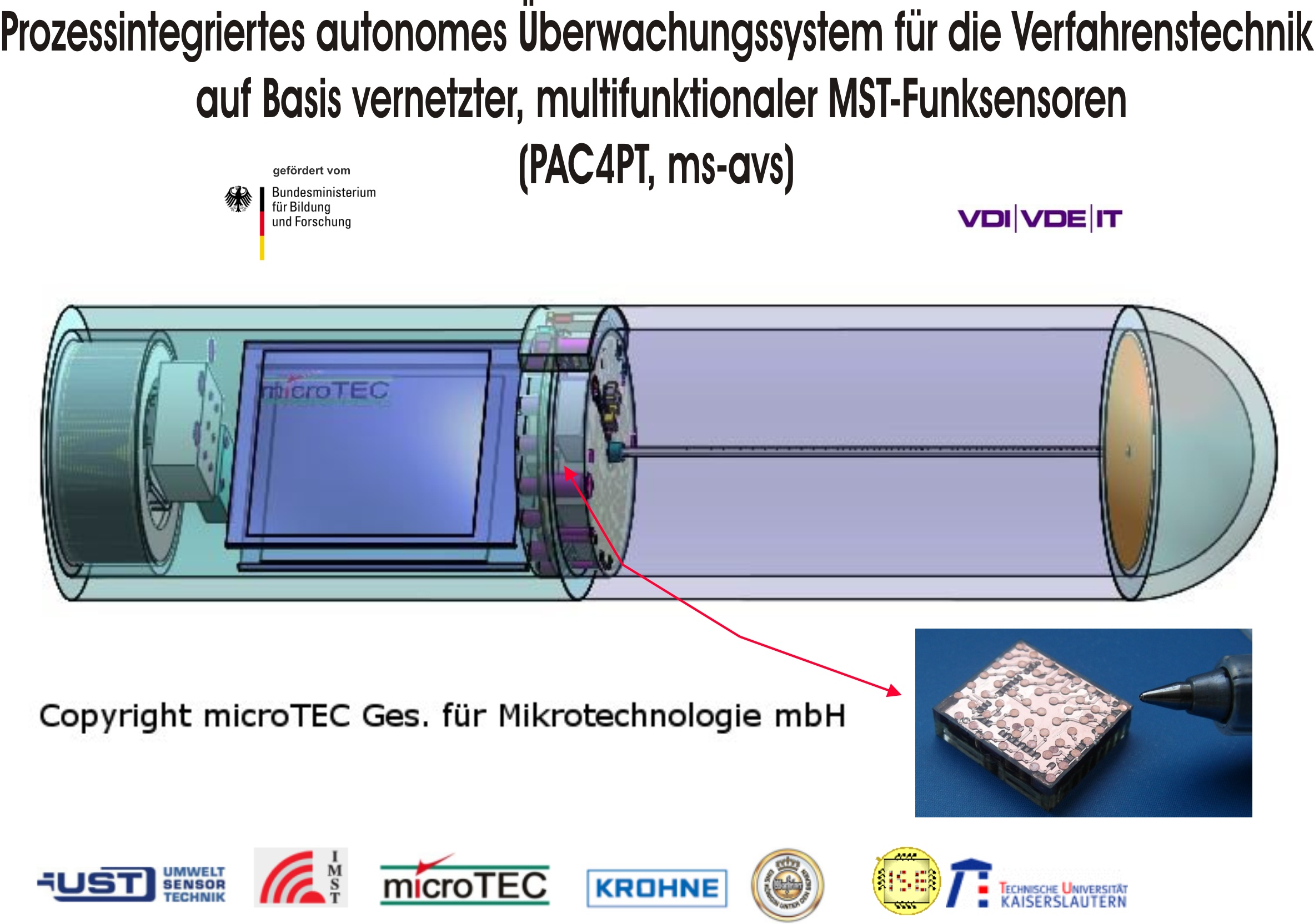
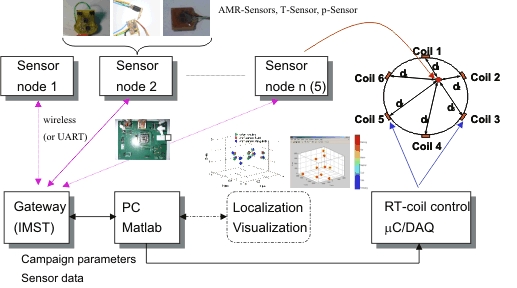
In the context of the German Federal research ministry BMBF, in the microsystems programme, sub programme autonomous, networked sensor systems, mst-avs, the programme PAC4PT (Process Integrated, Autonomous Measurement Units for Process Technology, German title: Prozessintegriertes autonomes Überwachungssystem für die Verfahrenstechnik auf Basis vernetzter, multifunktionaler MST-Funksensoren) with six sub projects was started in 2009 with the overall goal to provide a novel system for in-situ distributed process measurements and logging of relevant process data and location/time context. The sensor modules of the swarm was envisioned in a proprietary microsystem integration technology (RMPD 3D-CSP of microTEC). From several options, the fermentation tank monitoring was chosen from the field of beer brewing industry (Warsteiner). The sub project ROSIG of TUKL/ISE contributes to sensor node and system architecture design and implementation, related signal processing, electronics design, and functional test of components and system as well as multivariate distributed data visualization. In particular, the providing of location context as well as self-x properties in the nodes are pursued. As already anticipated in the ROSIG-proposal, state-of-the-art RF-based sensor node localization concepts/practice in wireless sensor networks cannot be adequately transferred to the regarded application in stainless steel containers, due to communication problems by refelctions from container hull and attenuation due to liquid media. Thus, from existing tracking technology, an approach for localization based on magnetic field generation and sensing by MEMS AMR-sensors was adapted, validated and is currently refined (Patent application pending, filing date:18.05.2012). The following picture gives a rough sketch of the overall PAC4PT-project (pdf with higher resolution):

The task of ISE, TU Kaiserslautern, was the development of a hardware/software architecture of the swarm's sensor nodes, which included the choice of components, circuits, and prototyping of the system (wire-wrap PCB prototype) before aspired MEMS integration in 3D-CSP technology of microTec. Additionally, the magnetic localization scheme, based on Sensitec's AMR sensor AFF755, and low-power conditioning electronics with analog sleep-mode and a coil system with basic actuation electronics were developed and combined with state-of-the-art and proprietary localization algorithms. Details of this research activity can be found in the following slide set from the 2011 public status seminar of the mst-avs programme. The magnetic localization concept also suits well for general indoor-localization problems and since numerous similar activities can be observed by now, with publication dates as our work, but after the patent filing date.
Another relevant contextual feature in wireless sensor networks, in addition to location context, is temporal context, which requires synchronous clocks of the swarm elements and the base station. Limited accuracy/stability of microcontrollers time-base require periodical synchronization activities. Commonly applied RF-based synchronization faces the same issues as localization itself. So, the magnetic localization method was extended to sensor node time-base synchronization. The invented method was included in the patent application after first-cut experimental validation (see slide set above and publications enlisted below.).
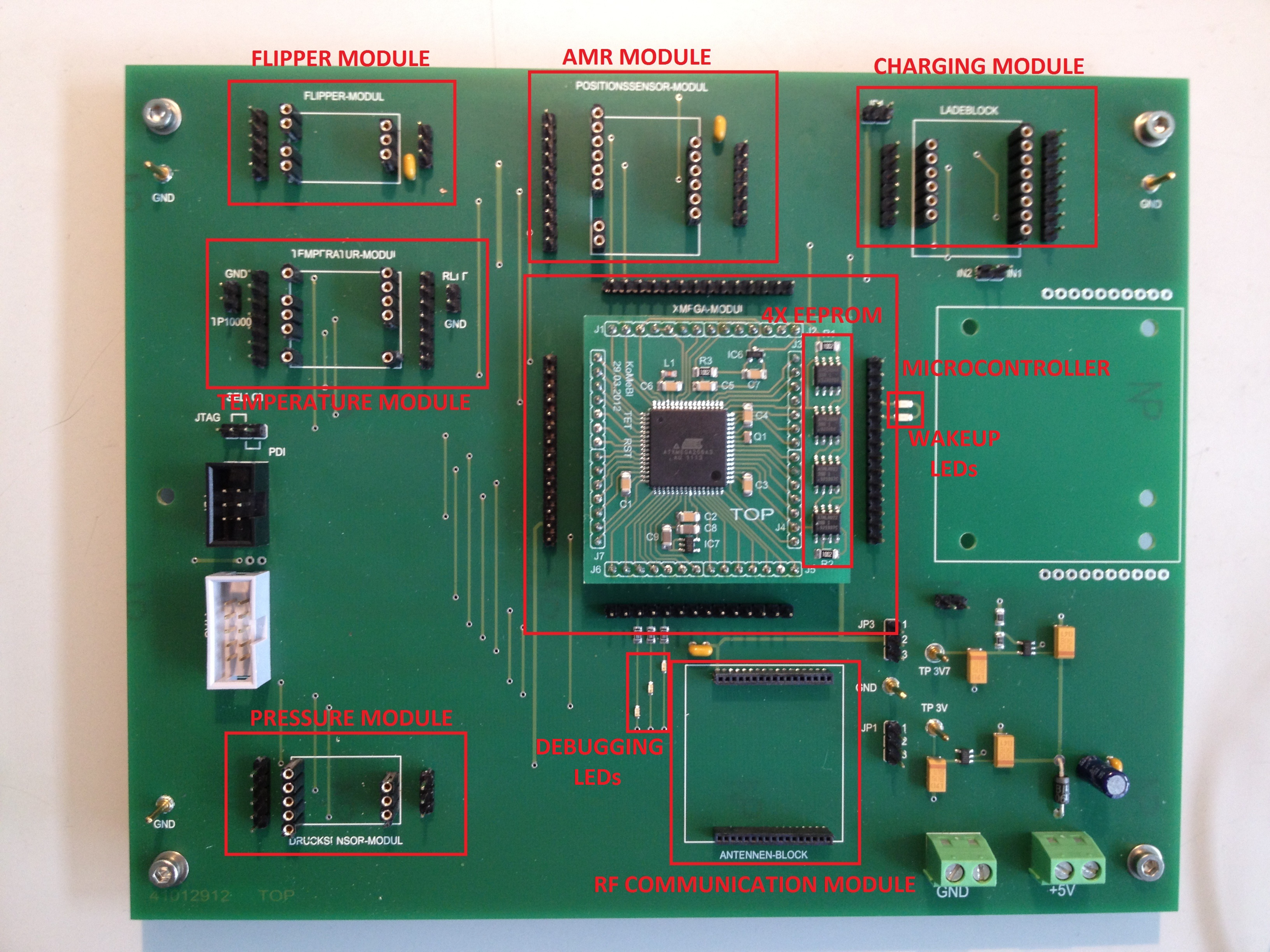
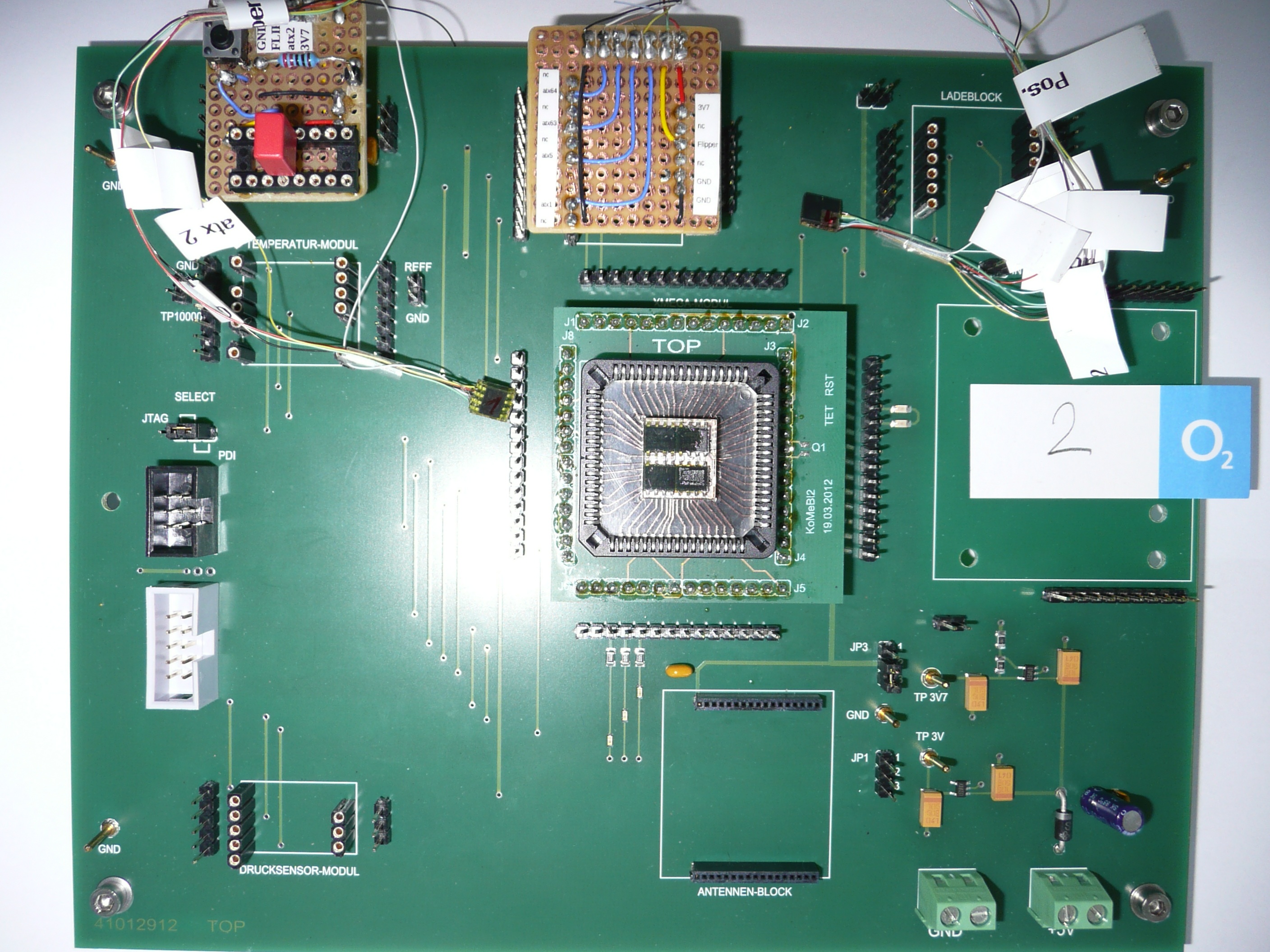
For flexible testing of hardware and software of the sensor swarm operation, a modular PCB has been developed from March 2012, following up the first wire-wrap prototype:

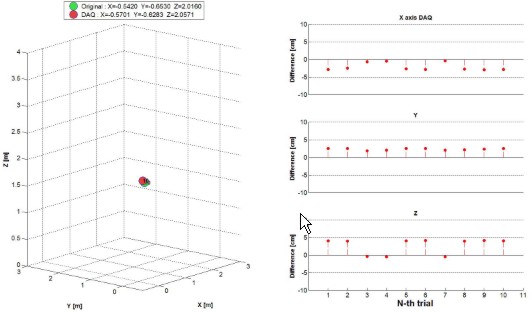
The first-cut localization achieved results (about 40 cm localization error with about 16 cm scatter) were encouraging and the final target container size of 6 m diameter and 20 m height seems basically feasibly. Improvement of localization algorithm, measurement electronics, and general calibration activities is pursued in 2012/2013 to achieve a more favorable localization error. On the same benchmark data, just by optimization of the algorithms, significantly better localization results could be achieved. Example of a single location evaluation from the first-cut results:
Our magnetic localization and synchronization system, embodied by the ROSIG-demonstrator, is presented on Hannover fair (see recent press release, presenters: Dennis Groben and Kittikhun Thongpull of ISE) .

Visit of the Minister of Economics Lemke of Rhineland-Palatina (Ministerium für Wirtschaft, Klimaschutz, Energie und Landesplanung, Rheinland-Pfalz) at the booth:

The research progress on the first five research items given above will be reported on a new web-page opening in 2014 entitled:
''3D-Integration of 3D-Sensing, Self-x Sensor Swarms''
Acknowledgment: The contributions of R. Stemler, H. Brass, and H. Heintz of TU Kaiserslautern in PCB design and assembly are gratefully acknowledged.
The funding by BMBF of this research and the support by VDE/VDI-IT are gratefully acknowledged.

![]()
| Status: | Concluded, duration 04/01/2009-12/31/2012 | |||
| Partners: | UST Umweltsensortechnik GmbH, IMST GmbH, Krohne Messtechnik GmbH & Co. KG, Warsteiner Brauerei Haus Cramer KG, microTEC Gesellschaft für Mikrotechnologie mbH (Coord.) | |||
| Financing: | BMBF - programme mst-avs, project PAC4PT-ROSIG, Fkz.: 16SV3604, supervision by VDE/VDI-IT Berlin
|
|||
| PI/Contact: | Prof. Dr.-Ing. Andreas König | |||
| Contributors: | Lakshmesha Rao, Dennis Groben, Kittikhun Thongpull, B.D. Kuncoro, S. Carrella, K. Iswandy, Mahesh Poolakaparambil, Akmal Johar, Abhay Chandra Kammara | |||
| Publications: | ||||
Rao, L., Iswandy, K., König., A.: “Cost Effective 3D Localization for Low-Power WSN Based on Modified Sammon’s
Stress Function with Incomplete Distance Information”. Soft Computing in Industrial Applications: Algorithms,
Integration, and Success Stories, AISC 75, X.Z. Gao et al. (Eds.), pp.149-156, Springer, 2010.
|
||||
Carrella, S., Iswandy, K., Lutz, K., König, A.: 3D-Localization of Low- Power Wireless Sensor Nodes Based on AMR
Sensors in Industrial and AmI Applications. In: 15. ITG-/GMA-Fachtagung Sensoren und Messsysteme, Nürnberg,
pp. 522-529, May 2010.
|
||||
Iswandy, K., Carrella, S., König, A.: Intelligent Magnetic Sensing System for Low Power WSN Localization Immersed
in Liquid-Filled Industrial Containers. In: Setchi, R; Jordanov, I.; Howlett, R. J.; Jain, L. C. (Eds.): Knowledge-Based
and Intelligent Information and Engineering Systems, LNCS, Vol. 6277, pp. 361-370, Springer, 2010.
|
||||
Iswandy, K., Carrella, S., König, A.: Localization System for Low Power Sensor Nodes Deployed in Liquid-Filled
Industrial Containers Based on Magnetic Sensing. In: 24. Messtechnisches Symposium des Arbeitskreises der
Hochschullehrer für Messtechnik e.V., Hamburg, pp.108-121, Sept 2010.
|
||||
Carrella, S., Iswandy, K., König, A.: A System for Localization of Wireless Sensor Nodes in Industrial Applications
Based on Sequentially Emitted Magnetic Fields Sensed by Tri-axial AMR Sensors. In: 11th Symposium
’Magnetoresistive Sensors and Magnetic Systems’, Mar. 2011.
|
||||
Carrella, S., Iswandy, K., König, A.: System for 3D Localization and Synchronization of Embedded Wireless Sensor
Nodes Based on AMR Sensors in Industrial Environments. In: 16. ITG-/GMA-Fachtagung Sensoren und Messsysteme,
Nürnberg, Jun. 2011.
|
||||
Pending Patent Application: Verfahren und Vorrichtung zur Ermittlung der räumlichen Koordinaten mindestens eines Sensorknotens in einem
Behältnis, (Method and Apparatus for
Determining the Spatial Coordinates of at least one Sensor Node in a
Container), filing date: 18.05.2010 (Angabe zur Priorität),
Internationales Veröffentlichungsdatum 24.11.2011, Internationale
Veröffentlichungsnummer: WO 2011/144325 A2
|